Zur Berücksichtigung des nichtlinearen Verhaltens des Stahlbetons wird an jedem Stababschnitt jeweils zur aktuellen Schnittgrößenkombination der Dehnungszustand sowie die zugehörigen tangentialen Steifigkeiten berechnet. Ändert sich jedoch die Biegesteifigkeit von einem Segment zum nächsten sehr stark, so wird dieser Abschnitt feiner geteilt, um die sich verändernde Steifigkeit genauer zu erfassen.
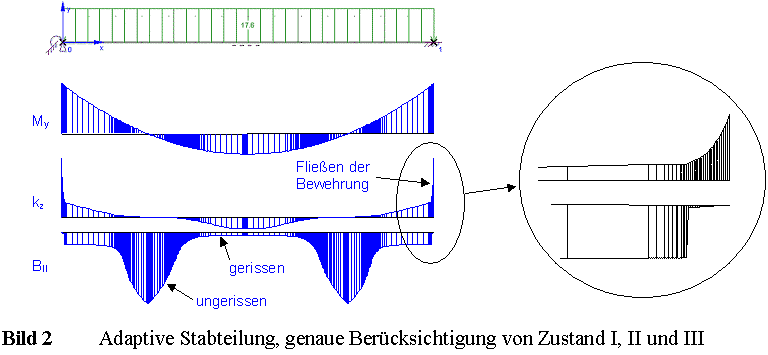
Durch diese adaptive Teilung wird erreicht, dass die Diskretisierung des Tragwerkes genau
so fein wie erforderlich durchgeführt wird (Bild 2): Bereiche mit geringen Steifigkeitsänderungen
werden in große Abschnitte geteilt, Bereiche mit steilen Gradienten entsprechend in kleine Abschnitte.
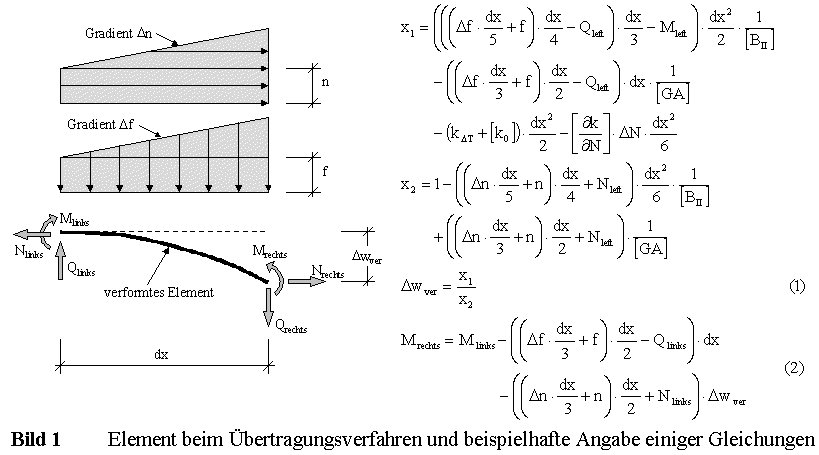
Mit dieser gezeigten Formulierung ist es möglich, bei gegebenen Startwerten am linken Ende des Balkens
die Zustandsgrößen für den gesamten Balken zu berechnen. Die zunächst unbekannten Startwerte werden auf
iterativem Wege ermittelt (entspricht dem Lösen einer DGL als Randwertaufgabe).